在我国低空经济产业的爆发式增长的同时,诸如“黑飞”“低慢小入侵”等威胁也日益严重,凸显出加强无人机监管、打击黑飞行为的紧迫性,有必要配置无人机综合探测&防御系统,一方面能够对非法侵入的无人机目标早探测、早识别、早预警,另一方面能够对无人机进行处置,消除潜在威胁。
通常来说,无人机综合探测及防御系统一般分为两个子系统:探测中心、防御(处置)中心,探测中心和防御中心实时保持数据的互联互通,高效协作完成目标区域的安全防护任务。探测中心向防御中心实时发送无人机目标的坐标、高度、速度及预计航线等信息,防御中心接到上述信息后采取处置手段,并在处置完成后向探测中心发送处置动作完成信号,探测中心对处置效果进行评估和反馈。
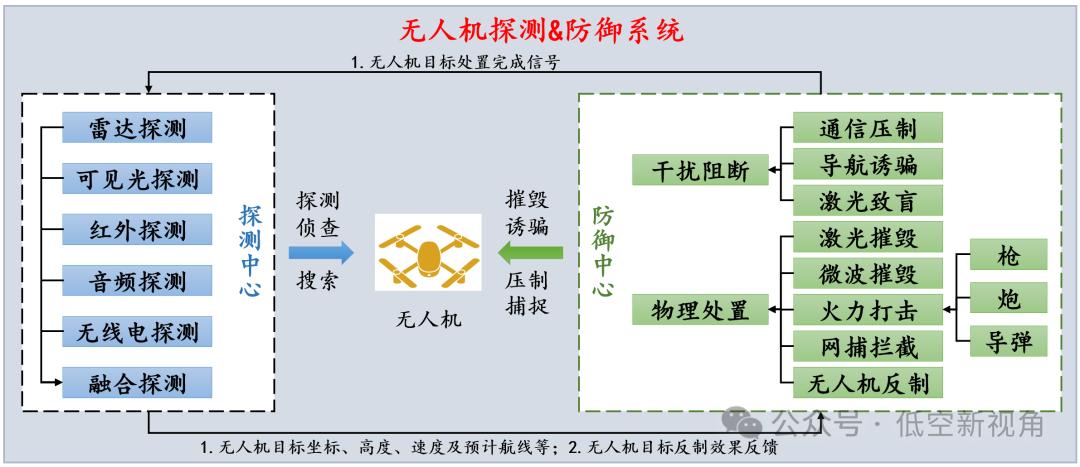
一、探测对非法入侵无人机的探测手段主要包括雷达探测、可见光探测、红外探测、音频探测、无线电探测以及融合探测等。
1.雷达探测雷达利用电磁波与无人机相互作用产生的回波来探测无人机。雷达内部的发射机产生特定频率、波形和功率的电磁波信号。通常,用于探测无人机的雷达工作在微波频段, 这是因为微波具有较短的波长,能够实现较高的分辨率,同时在大气中传播时损耗相对较小,能有效探测远距离目标。例如常见的 X 波段(8 - 12 GHz)雷达,其波长范围在 2.5 - 3.75 厘米,可较好地兼顾对小型无人机的探测精度和作用距离。产生的电磁波通过天线以波束的形式定向发射到空中,天线的设计决定了波束的形状和方向性,使雷达能够对特定空域进行扫描。传统的多普勒雷达可通过检测目标的速度和运动方向来识别无人机,相控阵雷达则能实现快速、多目标探测跟踪。比如,某型相控阵雷达可在数公里外精准探测到小型无人机,并持续跟踪其飞行轨迹。
2.可见光探测通过可见光成像,利用图像识别技术来识别无人机。高清光学摄像机能够清晰捕捉无人机的外形特征,实现对目标的识别与跟踪。例如,在城市环境中,可通过光学摄像机快速识别低空飞行的无人机。
3.红外探测基于无人机发动机、电子设备等部件产生的热量,通过检测红外辐射来发现无人机。在夜间或低光照环境下,红外热成像仪能有效探测到无人机的热信号,提高探测的准确性和可靠性。
4.无线电(射频)探测无人机与遥控器之间通过射频信号通信,射频探测设备可截获、分析这些信号,确定无人机的位置和通信频率。例如,一些射频探测系统能够在一定范围内快速扫描并定位无人机的射频信号源,为后续的反制提供精确位置信息。绝大多数 “低慢小” 无人机依靠遥控器进行操控,遥控器与无人机之间通过特定频率的无线电信号通信。常见民用无人机多使用 2.4GHz 或 5.8GHz 频段。无线电探测设备配备高灵敏度的接收天线,能够捕捉这些微弱的通信信号。一旦在监测区域内有无人机活动,其与遥控器间传输控制指令、状态信息等的无线电信号就会被探测设备截获。例如,当操作人员通过遥控器向无人机发送前进、悬停等指令时,探测设备可接收到相应的信号。通过对截获的无线电信号进行分析,就可以根据信号强度、频率特征以及三角定位原理确定无人机的位置。

5.音频探测无人机运行时,多个部件会产生声音。电机旋转时,其内部的电磁力作用、轴承摩擦以及空气与电机外壳的摩擦会产生特定频率范围的声音;螺旋桨高速旋转,与空气相互作用,产生气动噪声,这是无人机主要的噪声源之一。此外,一些无人机的电子设备工作时也可能发出微弱声音。利用模式识别算法,将提取的特征与预先建立的无人机声音特征库进行比对。特征库中包含了不同类型、不同型号无人机的声音特征信息。通过比对相似度,判断采集到的声音是否来自无人机,并识别出无人机的类型。同时,基于麦克风阵列采集到的信号相位差和强度差,运用定位算法(如时延估计定位算法)计算出无人机的位置。例如,通过计算声音到达不同麦克风的时间差,结合麦克风的位置信息,可确定声音源(即无人机)的方位和距离。
6.融合探测综合运用多种探测技术,以提升对无人机探测的准确性、可靠性和全面性。单一探测手段往往存在局限性,融合探测能相互弥补不足,有效应对复杂环境下的无人机探测需求。以雷达与光电探测融合为例来说明:
优势互补:雷达擅长远距离探测,能快速获取无人机的距离、速度和方位信息,但在识别低反射截面积目标及复杂环境下易受干扰。光电探测(如光学相机、红外热成像仪)则具有高分辨率成像能力,可直观识别目标外形特征,在近距离及复杂电磁环境中有较好表现。两者融合,雷达先进行大范围搜索定位,光电设备再对雷达发现的疑似目标进行精细识别与跟踪,提升探测精度与可靠性。例如,在机场周边,雷达发现远距离低空飞行目标后,光电设备迅速聚焦,通过识别目标外形、发动机热量等特征确认是否为无人机。
数据融合处理:对雷达与光电设备获取的数据进行融合处理。时间上,确保不同设备数据同步;空间上,统一坐标系统。然后采用数据层融合,直接合并原始数据;特征层融合,提取并融合两者特征;决策层融合,根据各自决策结果综合判断。如决策层融合中,雷达判断目标为飞行器,光电设备识别为无人机,综合判定为无人机目标。
原创 低空新视角


